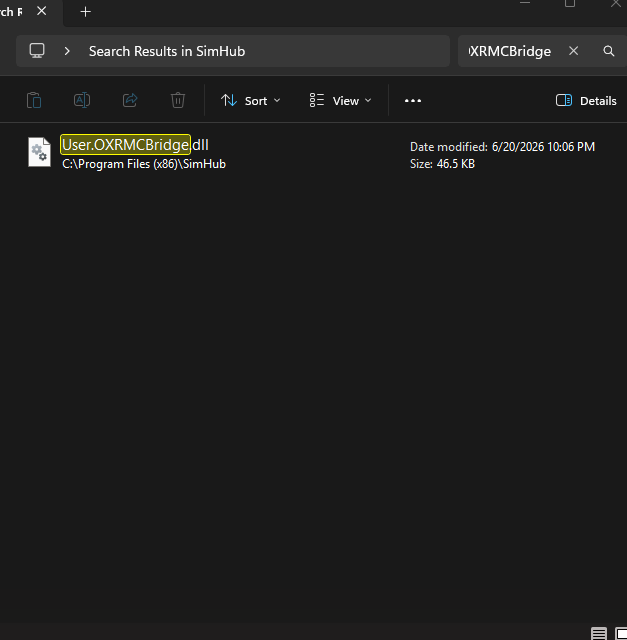
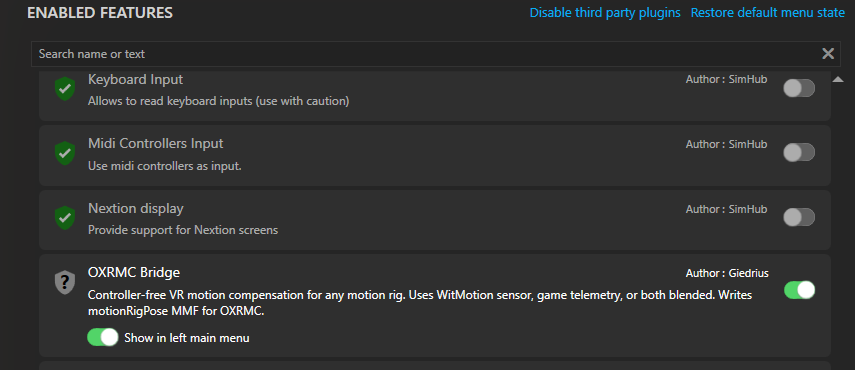
Free SimHub plugin
Stop mounting a controller on your motion rig.
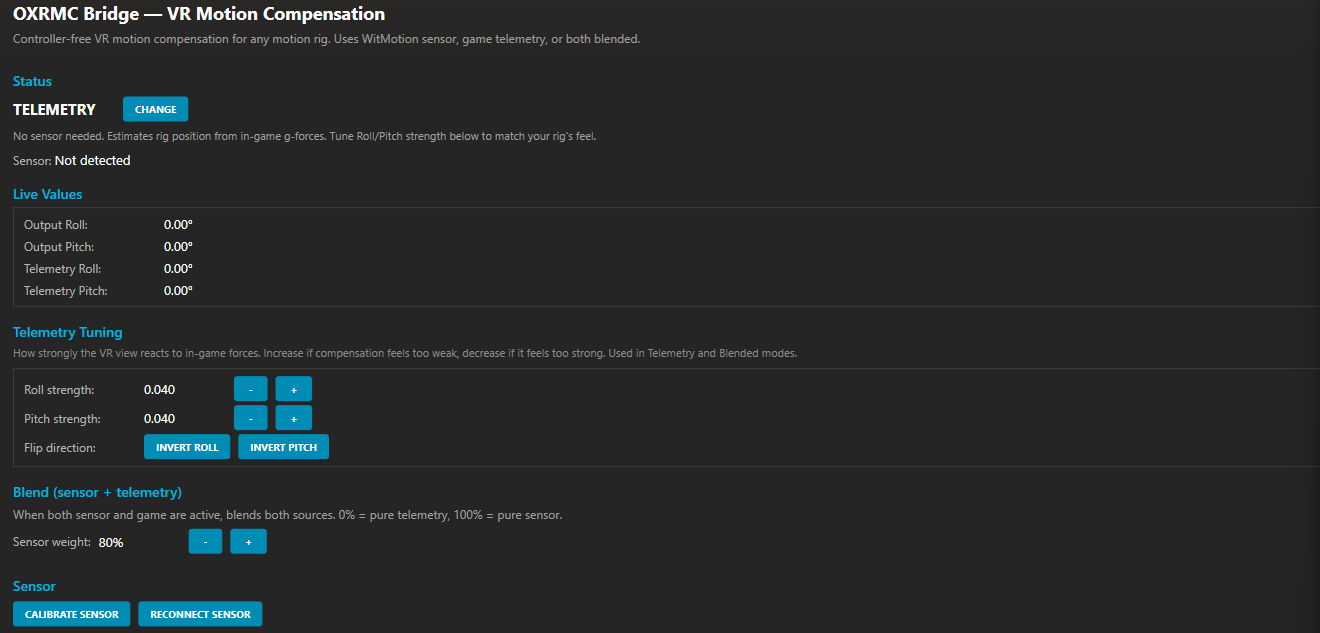
OXRMC Bridge feeds your motion rig's real pose straight into OpenXR-MotionCompensation — so your VR view stays locked while the rig moves. No controller to strap on. No controller falling asleep mid-stint.